
「人に寄り添うロボット」を開発し、介護や暮らしを支える未来をつくる|輝け超高齢化社会 ♯1
「輝け超高齢化社会」は、ネガティブな方向に捉えられがちな「超高齢化社会」を、明るく、魅力的なものとする研究に焦点を当てるシリーズです。現代文明の中に生きる私たちは、自動車などの多くの「機械」に囲まれて暮らしています。そうした機械は、私たちの生活を便利にする一方で、使いこなすためには、その操作や動きに人間側が合わせる必要があります。シリーズ第1回で取り上げるのは、使う人が我慢をしなくてよいロボットの研究。サービスロボティクスの研究者である中後大輔先生は、「これからの社会では、人間が機械に合わせるのではなく、『人間に寄り添う機械』が求められる」と語ります。高齢化が進展する未来の日本で、あるべきロボットや機械とはどういうものなのか、お聞きしました。

Profile
中後 大輔(CHUGO Daisuke)
関西学院大学 工学部 知能・機械工学課程 教授。博士(工学)。2000年東京理科大学理工学部卒業、2005年埼玉大学大学院理工学研究科後期博士課程修了。電気通信大学大学院情報システム学研究科助教などを経て、2009年4月関西学院大学理工学部人間システム工学科着任。2009年12月~2015年3月独立行政法人理化学研究所 基幹研究所 理研-東海ゴム人間共存ロボット連携センター 客員研究員。“人と共存するロボット開発”をメインテーマに、ロボット制御技術の開発などを行っている。
この記事の要約
- 高齢化社会では「人が機械に合わせる」から「機械が人に合わせる」への転換が必要。
- すべての動作の起点となる「立つこと」が自由にできると、QOLは大きく向上する。
- 「人に寄り添うロボット」が当たり前の未来では、老化による不便が大きく軽減される。
サービス工学に基づきロボットを開発
少子高齢化が進む日本では、高齢者の介護の現場において、ロボットを始めとする最新のテクノロジーを用いた機械の活用が進むと予想されています。若い世代は減り続ける一方で、高齢者の数は今後しばらく増え続けることが確実です。そのため24時間、休みなく稼働することが可能なロボットを導入することで、介護の担い手の労働負担を大きく減らすことが期待されています。しかし、「これまでの機械は、基本的に人間が機械に合わせる必要がありました」と中後先生は問題点を指摘します。
「通常の工業製品は、製造のコストを下げるために、大量生産することが前提で設計されます。例えば既成品の洋服は、S、M、Lなどのタグがつけられており、買う人のほうが自分に合ったサイズの服を購入します。しかし、人の身長や体型には個人差がありますから、自分に本当にぴったり合ったサイズの服を、既製品の中から買うのは困難です。そのことは自動車のような機械についても同じです。自動車の運転席はドライバー一人ひとりに合わせてデザインされてはいません。ハンドルを回す力の入れ方や、ブレーキやアクセルの踏み方など、人間が機械に合わせて、細かい運転の感覚を含む操作を習得する必要があります」
そうした「機械の求める動きに、人間が合わせる」設計思想は、基本的にユーザーを「若い年齢の、心身ともに健常な人と想定している」と中後先生は述べます。しかし、高齢であったり障がいがあるなどで体が思うように動かない人が、機械に自分の動作をあわせることは難しく、ときに不可能です。
「高齢化が進んだ社会では、機械に人が合わせる設計思想は、技術の怠慢と見なされるようになるのではないでしょうか。今後、必要となるのは、個人によって異なる身体や個性を持つ人間のほうに技術が寄り添い、機械が人間に動きを合わせることだと思います」
中後先生がそう考えるようになったきっかけは、学生時代に研究室で、恩師である東京大学の淺間一教授が提唱する「サービス工学」という領域に触れたことでした。工業生産の歴史を振り返ってみると、長い間、重視されてきたのは「性能」や「コスト」。自動車ならどれぐらい速いスピードが出るか、燃費が良いか、あるいはどれぐらい安く、早く生産できるか、そういった視点でほとんどのモノづくりは行われてきました。
「しかしユーザーにとって本当に大切なのは、機械のスペックや、生産にかかるコストではありません。一番重要なのは、どれぐらいその機械から、サービスや恩恵を受けられるかです。淺間先生は、そうした観点に基づく『サービス工学』の第一人者でした。先生は大量生産・大量消費を前提とした、モノの性能のみに着目する従来の工学ではなく、機械から得られる恩恵やサービスを最大化することを目的とする工学の必要性を訴えました。私の開発する『人に寄り添うロボット』も、サービス工学の考え方に立脚しています」
中後先生がとくに力を入れているのは、介護現場で活躍するロボットの研究です。介護現場に注目するようになったのは、ポストドクターだった若い頃の体験がきっかけだったと言います。
「私の祖母が老人介護施設に入ることになり、そこで初めて介護の現場を目にしたのです。入居者の介護を担当するスタッフの方々は、皆さん一生懸命にケアに取り組まれているのが伝わってきましたが、その仕事はあまりにも『肉体労働』が占める割合が多く、『テクノロジー』がほとんど活用されていないことを感じました。
介護施設での暮らしは集団生活となるため、介護者が入居者一人ひとりの細かい要望に応えることは難しく、流れ作業的にケアせざるを得ない実情も感じたと言います。
「介護される人も、介護をする人も、そこにいる人たちが少しずつ“我慢”をすることで、どうにか日々の生活が成り立っているようにも思えました。そこで『自分の持っている技術の知識で、介護の現場を改善することに貢献しよう』と決心したのです」
現在、平均的な老人介護施設に入居するには、一般に多額の費用がかかると言われます。介護ロボットの実用化は、そうしたケアにかかるコストを大きく下げるとともに、将来の介護現場の労働力不足の解決にもつながると中後先生は話します。
ロボット技術で「立つこと」と「移動」を支援
現在、中後先生は「人に寄り添うロボット」として「起立支援機能付リハビリ歩行器」の研究開発を進めています。
「介護ロボットの設計では、まず初めに想定するユーザーを決めます。完全に寝たきりの人なのか、それとも年齢の若い骨折している人か、脳卒中で半身麻痺の人なのかによって、必要な機能はぜんぜん違うからです」
中後先生が着目したのが、『介護予防』段階にある、要支援1、2の人。要支援1とは、立ち上がるときに手助けが必要ですが、一度立ち上がれば自力で歩行可能な人を指します。要支援2では、立っているときや歩くときに、手助けや支えが必要となります。
「高齢者などの要支援者はトイレなどに行くときに、自分一人で立てなければ、誰かを呼んで支えてもらわなくてはなりません。これが心理的にも大きな負担になります。人がQOLを高く保って生活するには、自分の意志や力だけで体をある程度自由に動かせることが大切であり、そのためにまず必要なのが『立つこと』なのです」
このような考えのもと、一人では立てなくても「支えがあれば立つことができる」という人をユーザーに想定し、起立支援を行うロボットを開発しました。
「単純に見える『立つ』という行為ですが、椅子から人が立つのには、3つの段階の動作が必要となります。まず体を前に傾けて足の下に重心を移動する。次に転ばぬようバランスを取りながらお尻を持ち上げる。そして足を伸ばして安定した立ち姿をとる、の3つです。普通のロボットは『立ち上がるためにこのように動きましょう』というたった一つの『正解』に沿って動きます。それに対して私が開発したロボットは、それぞれの動作をどこまで補助するかが、ユーザーによって変化するのが大きな特徴です」

なぜユーザーごとに変化する必要があるのでしょうか。中後先生は、その理由を次のように説明します。
「人は字を書くとき、毎回まったく同じ形にはなりませんよね。同じ『あ』という字でも、書くたびに5%ぐらいは形状のゆらぎがありますが、それでもきちんと読めます。ところがその字を見て、『この横棒の傾きの角度が違う』などと毎回誰かに指摘されたら、不快になるでしょう。それと同様、人をサポートするロボットも、ある程度の動きのゆらぎを許容することが必要なのです。また、機械が要請する『正しい動き』に身体をあずけてしまう生活を続けると、自分で自分の体をコントロールする能力が失われていきます。老化で動きづらくなった体が、ますます弱ってしまいかねないのです」
中後先生が開発した「起立支援機能付リハビリ歩行器」は、新たに開発したソフトウェアによって個別のユーザーに合わせてサポートを調整することを可能にしました。開発には介護施設でケアにあたっている理学療法士や作業療法士などの専門家の意見を取り入れ、「専門知識のない人でも自分一人でカスタマイズできるようにしたい」と話します。
ロボットが特別なものではなくなる未来
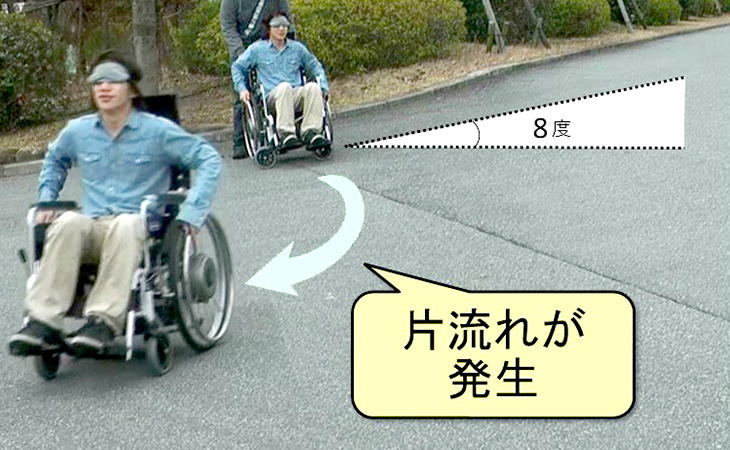
他にも中後先生は、「駅のホームなどに隠れた危険を未然に防ぐ機能」を実装する車椅子の研究開発も進めています。
「駅のホームや道路の歩道は、雨水を逃すために、線路や車道側に向かってわずかに傾斜がついています。歩行者はほとんど気づきませんが、車椅子で移動していると、重力で自然に線路や車道の方向に引っ張られてしまい、ときに非常に危険な状況が起こりうるのです」。そうした「魔の瞬間」を防ぐために中後先生は、車輪に重力の影響による加速を無くすことができる「サーボブレーキ」と呼ばれる特殊なブレーキを装着した車椅子の開発を進めています。
「サーボブレーキを実装した手漕ぎ車椅子は、少しの傾斜がついた地面でも、まるで平地を走行しているかのような感覚で操作することができます。ユーザーに装置の存在を意識させることなく、未然に危険を防ぐことができるのが大きな特徴で、いま協力メーカーと一緒に実証試験に取り組もうとしている段階です」

車椅子の開発では、よりユーザーの「移動の自由」を高めるための研究も進めています。「普通の車椅子は自動車と同じように、前後の移動は簡単にできますが、横方向に移動するのはとても大変です。私たちは今、前後はもちろん、左右方向への走行も自由自在に行える機構を持った車椅子の開発にも取り組んでいます。この前後左右に小回りがきく機構は、人と一緒に歩くロボットなどには必須の機能となるはずです」
日々、中後先生が研究開発に取り組む「人に寄り添うロボット」。これらロボットが社会に浸透していくと、ロボットと人間の関係性や、人々の老いに対する受け取り方も変わってくるだろうと、中後先生は予想します。
「ロボットが特別なものではなくなっていく、そういう未来が確実に到来すると思います。そして当たり前に暮らしに溶け込んだロボットたちが、人類にとって大きな恵みをもたらしてくれるはずです。例えば今から数千年前の縄文時代に生きた人は、近眼になって遠くのものが見えなくなったら、狩りができませんから一人では生きていけなかったはずです。しかし現在では、近眼になったとしてもメガネやコンタクトレンズをつけることで、一人で生活しても困ることはほぼ無くなりました。それと同じように、ロボットが私たちの生活にとって自然なものになったとき、老化で体が弱っても、生活において困ることはなくなるはずです」
「人に寄り添うロボット」が、日々の暮らしを快適なパートナーとして支えてくれる。明るい高齢化社会を実現するために、中後先生の挑戦は続きます。
この先生のコラムを読む
取材対象:中後 大輔(関西学院大学工学部 知能・機械工学課程 教授)
ライター:大越 裕
運営元:関西学院 広報部
※掲載内容は取材当時のものとなります



